本文档详细介绍云上OpenClaw(Clawdbot)快速接入飞书的完整流程,涵盖前置准备、飞书应用创建、机器人配置、OpenClaw通道配置、权限设置及发布配对等操作,帮助用户快速完成飞书机器人接入,实现交互功能。
1. 前置准备工作
在正式为OpenClaw(Clawdbot)配置接入飞书机器人前,请依次检查以下事项是否准备完成:
-
已拥有一个飞书账号(用于登录飞书开放平台,创建企业自建应用);
-
已购买预装OpenClaw,且镜像版本为2026.2.17及以上的轻量应用云主机或云服务器(确保支持通道配置功能)。
2. 接入飞书操作流程
2.1 创建飞书企业自建应用
-
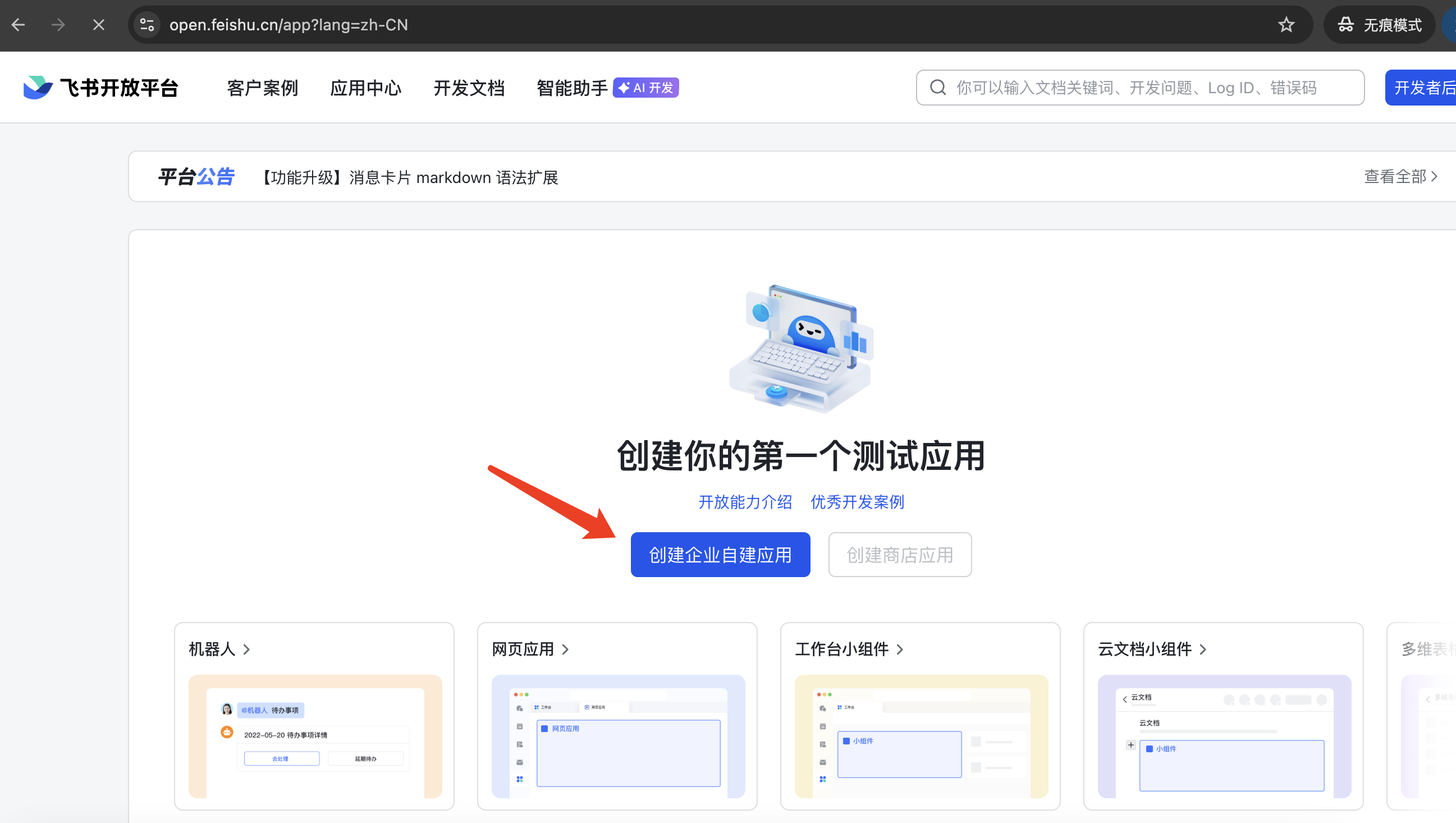
使用已有的飞书账号,登录 飞书开放平台;
-
登录成功后,点击页面中的「创建企业自建应用」按钮;
-
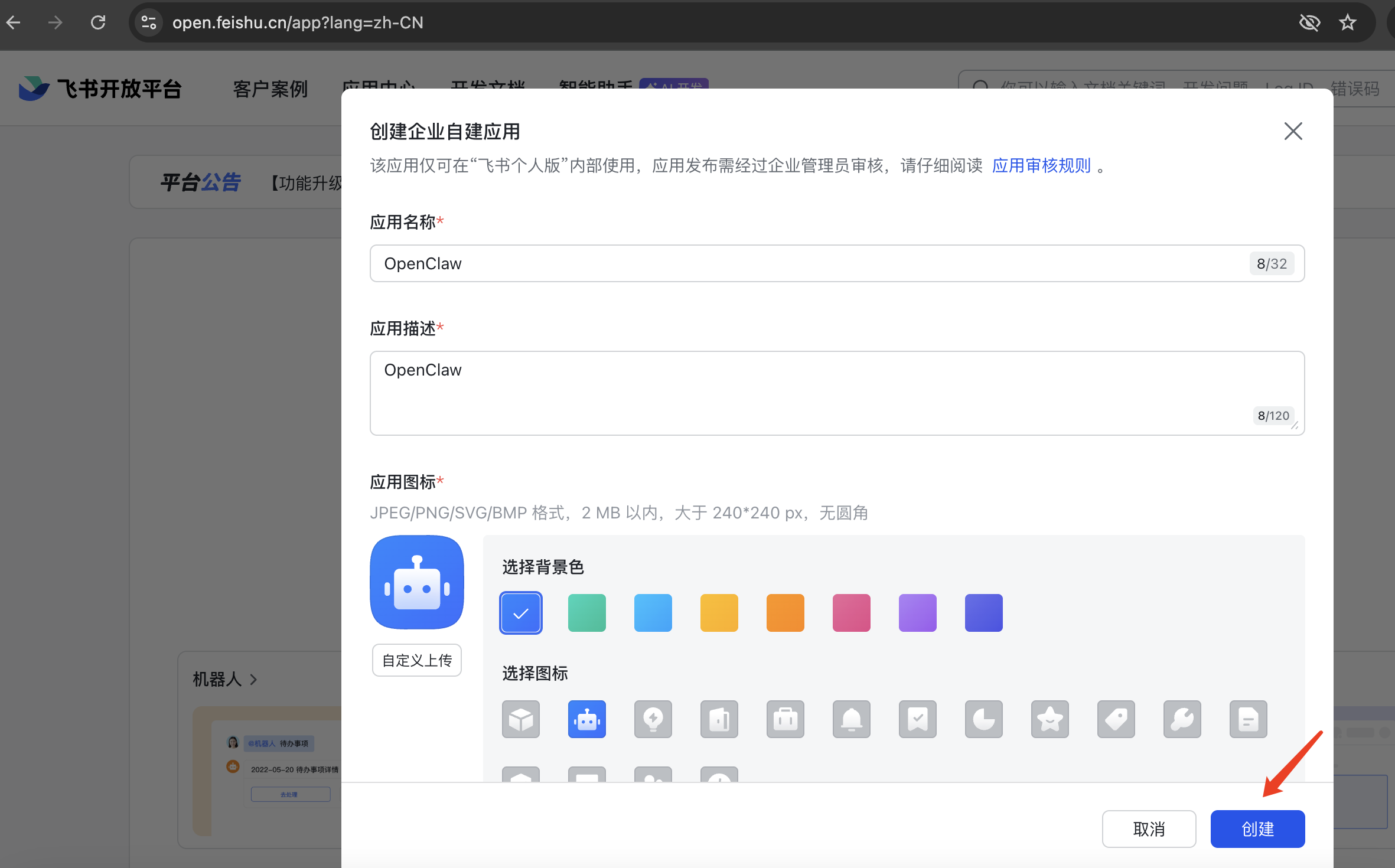
填写应用基础信息:
-
应用名称:建议填写直观名称(如 “OpenClaw助手”);
-
应用描述:简要说明应用用途(可选);
-
应用图标:支持JPEG/PNG/SVG/BMP格式,大小不超过2MB,尺寸大于240*240px,无圆角;
-
-
填写完成后,点击「创建」按钮,进入应用管理页面。
2.2 添加机器人能力
-
在已创建应用的管理页面,左侧导航栏中找到并点击「添加应用能力」;
-
在弹出的应用能力列表中,搜索并选择「机器人」,点击「添加」按钮;
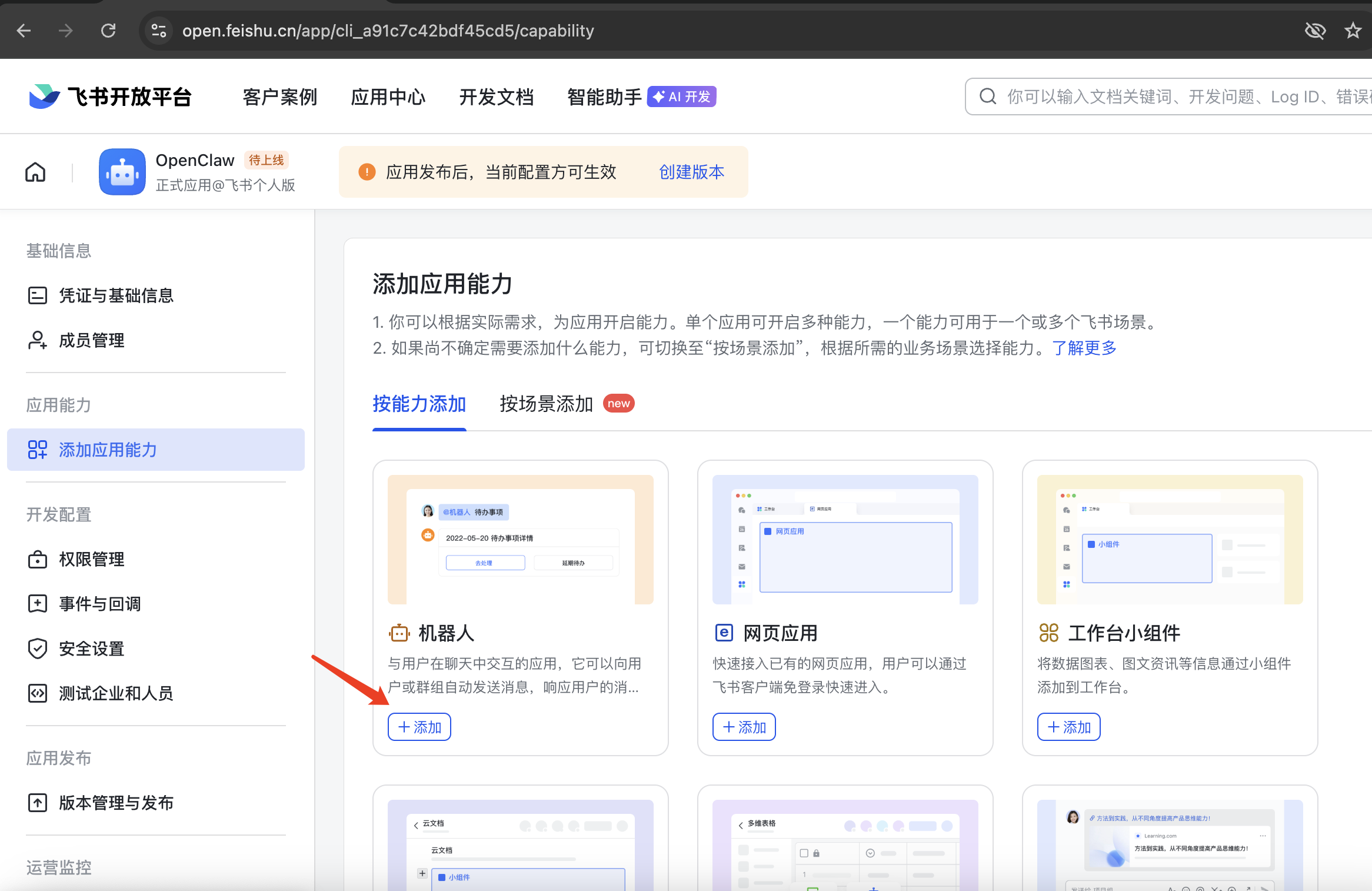
提示:添加机器人之后,可暂不发布应用,待所有配置完成后一并发布,避免配置过程中影响使用。
2.3 查询并保存AppID和AppSecret
AppID和AppSecret是OpenClaw配置飞书通道的核心参数,需妥善保存,具体操作如下:
-
在应用管理页面左侧导航栏,找到「凭据与基础信息」,点击进入;
-
在页面中找到「App ID」和「App Secret」两个参数,分别点击右侧「复制」按钮;

-
将复制的AppID和AppSecret保存到个人记事本或备忘录中(注意数据安全,切勿泄露),后续配置OpenClaw通道时需使用。
2.4 为OpenClaw配置模型和通道
登录已部署OpenClaw的UCloud轻量应用云主机,按照以下步骤完成配置:
-
在云主机终端中输入命令:
openclaw config,按下回车键; -
在弹出的配置菜单中,选择「Local」选项;
-
继续选择「Channels」(通道配置)选项;
-
选择「Configure/link」(配置/关联)选项;
-
在通道类型中,选择「Lark/Feishu (飞书)」;
-
根据提示,输入之前保存的「AppID」和「AppSecret」,完成配置并保存。
大模型配置可参考云上OpenClaw部署文档.
2.5 飞书机器人相关配置
2.5.1 事件配置
订阅方式设置
-
回到飞书应用管理页面,左侧导航栏点击「事件与回调」,进入事件配置页面;
-
在「事件配置」页签中,「订阅方式」选择「长连接接收事件」,点击「保存」按钮。
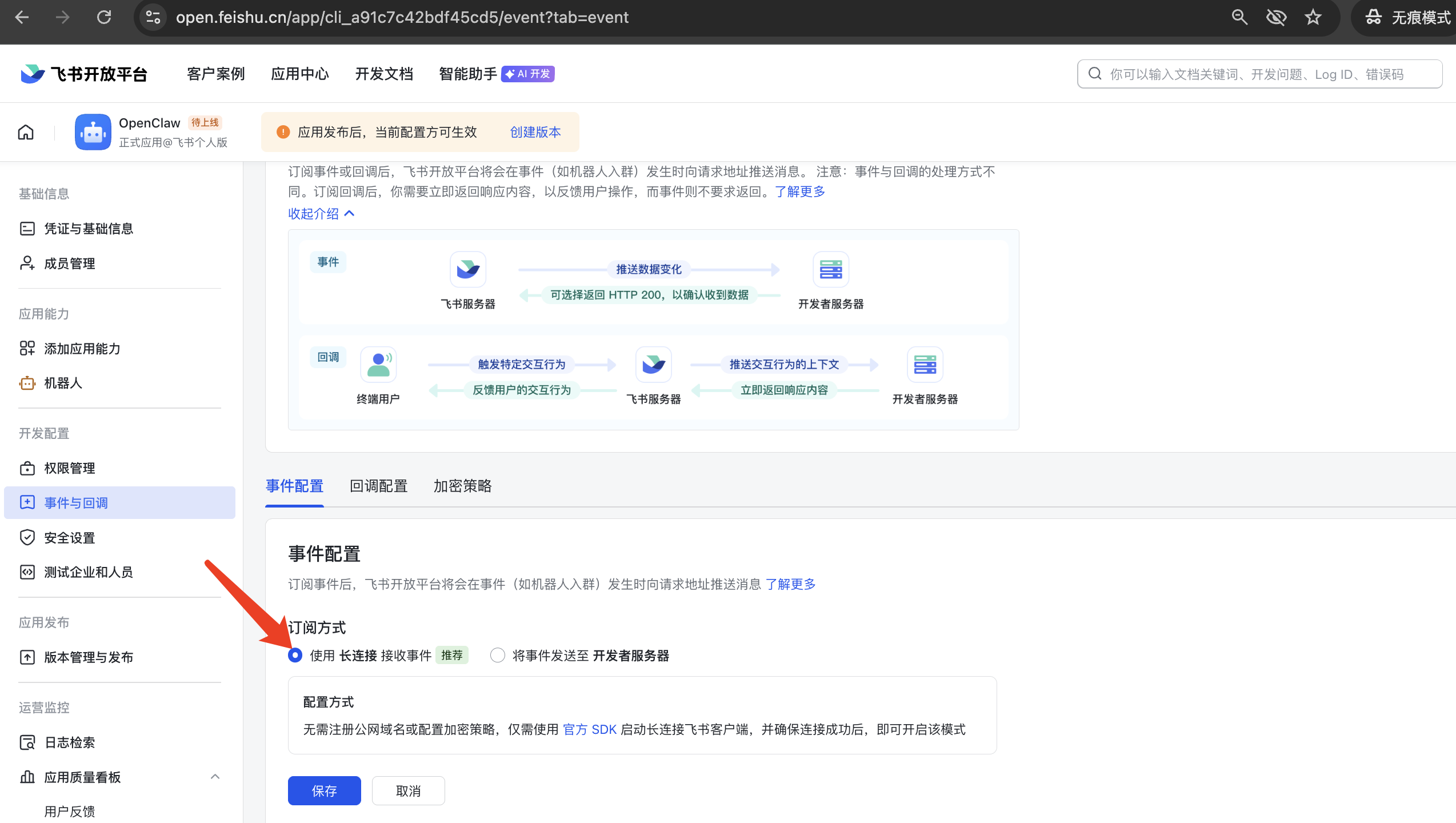
注意:如果点击保存后报错提示“未建立长连接”,请先检查App ID和App Secret是否已在OpenClaw通道配置中正确填写
添加事件
-
在「事件配置」页面中,点击「添加事件」按钮;

-
在弹出的事件列表中,搜索并选择「接收消息」,点击「确认添加」;
-
按照页面指引,确认开通「接收消息」相关权限,完成事件添加。
提示:若需将飞书机器人添加到聊天群组中使用,可参考上述步骤,继续添加「消息已读」「机器人进群」「机器人被移出群」等群组相关事件,确保群聊场景正常使用。
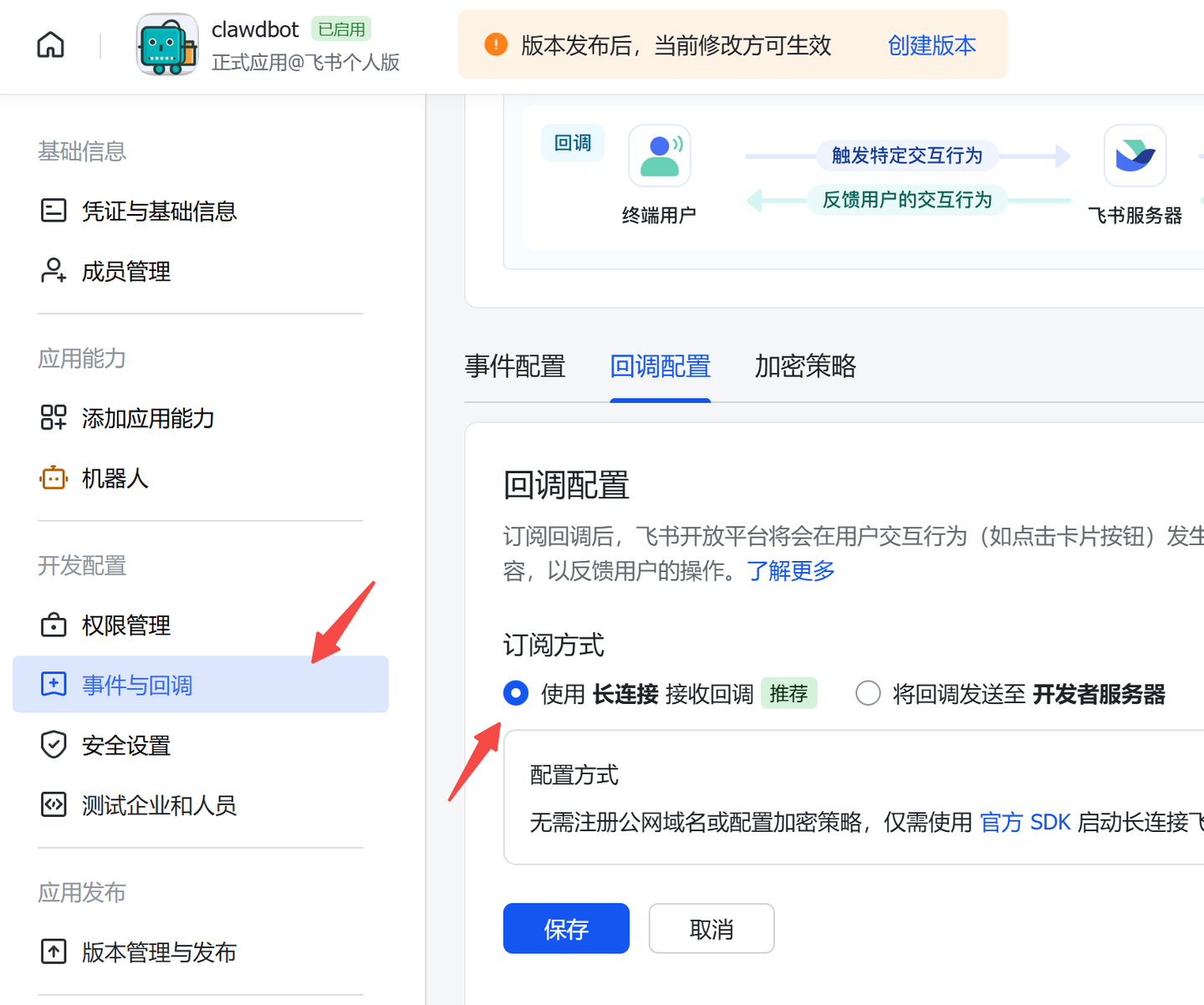
2.5.2 回调配置
-
在「事件与回调」页面,切换到「回调配置」页签;
-
「订阅方式」选择「使用长连接接收回调」,点击「保存」按钮;
-
无需填写其他回调地址,配置将自动生效。
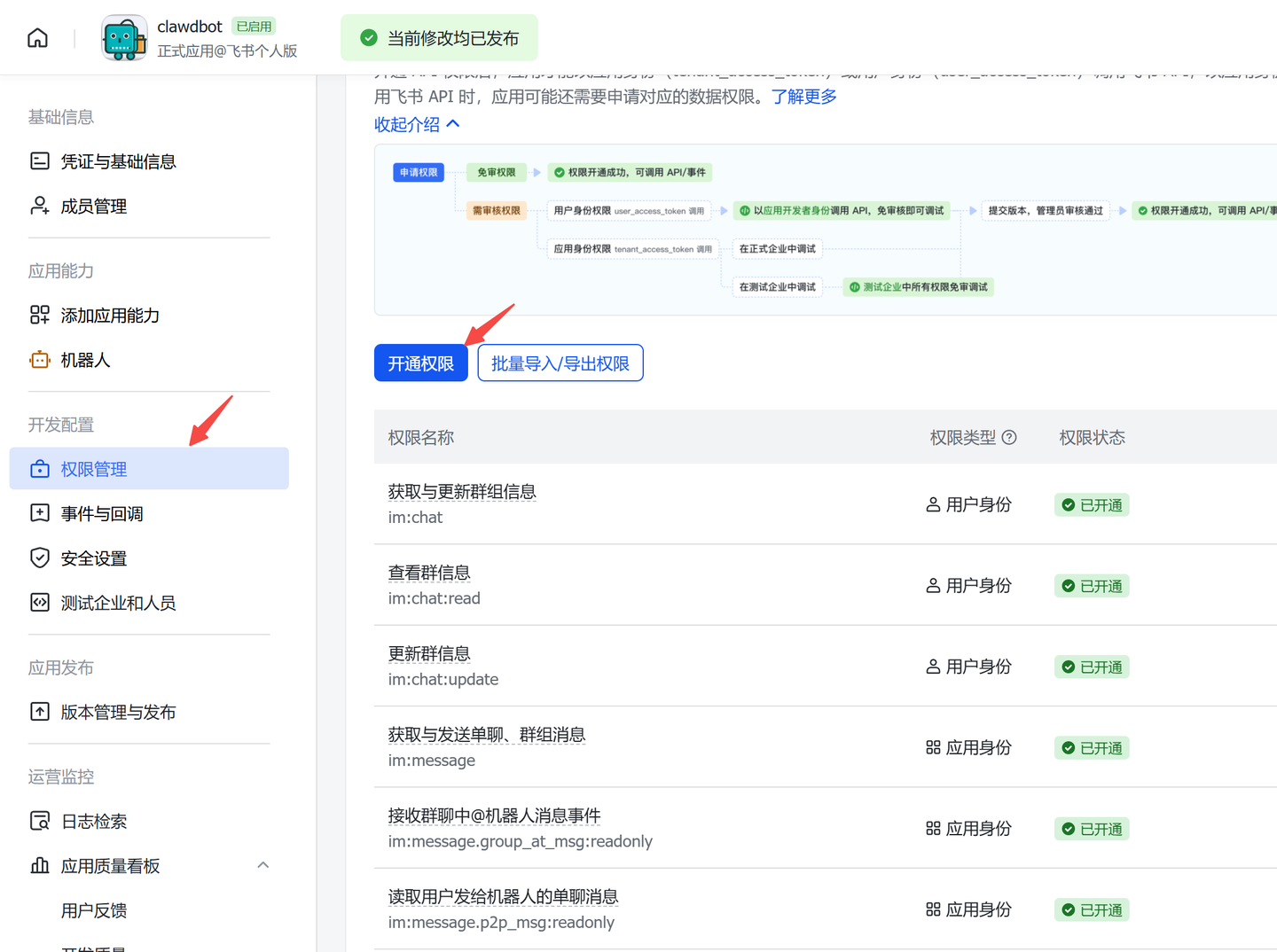
2.5.3 权限配置
权限配置是飞书机器人正常收发消息、交互的关键,可按需开启权限,也可通过批量导入快速配置,具体操作如下:
-
在飞书应用管理页面左侧导航栏,找到「权限管理」,点击进入;
-
方式一:按需开启权限,参考下方「权限说明」,勾选所需权限并保存;
-
方式二:批量导入权限,点击页面中的「批量导入权限」按钮,弹出权限导入窗口,清空窗口原有内容,粘贴下方权限JSON代码,点击确认完成导入。
权限说明
一、基础权限(必开,确保机器人正常基础交互)
| 权限范围 (Scope) | 权限类型 (Permission) | 功能描述 (Description) |
|---|---|---|
| contact:user.base:readonly | User info | 获取基础用户信息 |
| im:message | Messaging | 收发消息 |
| im:message.p2p_msg:read only | DM | 读取机器人的私信消息 |
| im:message.group_at_msg:readonly | Group | 接收群内 @ 机器人的消息 |
| im:message:send_as_bot | Send | 以机器人身份发送消息 |
| im:resource | Media | 上传/下载图片/文件 |
二、可选全功能权限(按需开启,扩展机器人功能)
| 权限范围 (Scope) | 权限类型 (Permission) | 功能描述 (Description) |
|---|---|---|
| im:message.group_msg | Group | 读取群内所有消息(敏感) |
| im:message:readonly | Read | 获取消息历史记录 |
| im:message:update | Edit | 编辑/更新已发送的消息 |
| im:message:recall | Recall | 撤回已发送的消息 |
| im:message.reactions:read | Reactions | 查看消息的互动反馈 |
批量导入权限JSON代码:
{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"application:application.app_message_stats.overview:readonly",
"application:application:self_manage",
"application:bot.menu:write",
"cardkit:card:write",
"contact:user.base:readonly",
"contact:user.employee_id:readonly",
"corehr:file:download",
"docs:document.content:read",
"event:ip_list",
"im:chat",
"im:chat.access_event.bot_p2p_chat:read",
"im:chat.members:bot_access",
"im:chat:read",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.group_msg",
"im:message.p2p_msg:readonly",
"im:message:readonly",
"im:message:send_as_bot",
"im:resource",
"sheets:spreadsheet",
"wiki:wiki:readonly"
],
"user": [
"aily:file:read",
"aily:file:write",
"contact:contact.base:readonly",
"im:chat.access_event.bot_p2p_chat:read"
]
}
}
 清空原有内容,并将刚刚复制的代码粘贴进去。
清空原有内容,并将刚刚复制的代码粘贴进去。
 提示:确保消息、机器人、事件订阅等相关权限均已开启,后续使用飞书机器人过程中,可根据实际需求调整权限设置。
提示:确保消息、机器人、事件订阅等相关权限均已开启,后续使用飞书机器人过程中,可根据实际需求调整权限设置。
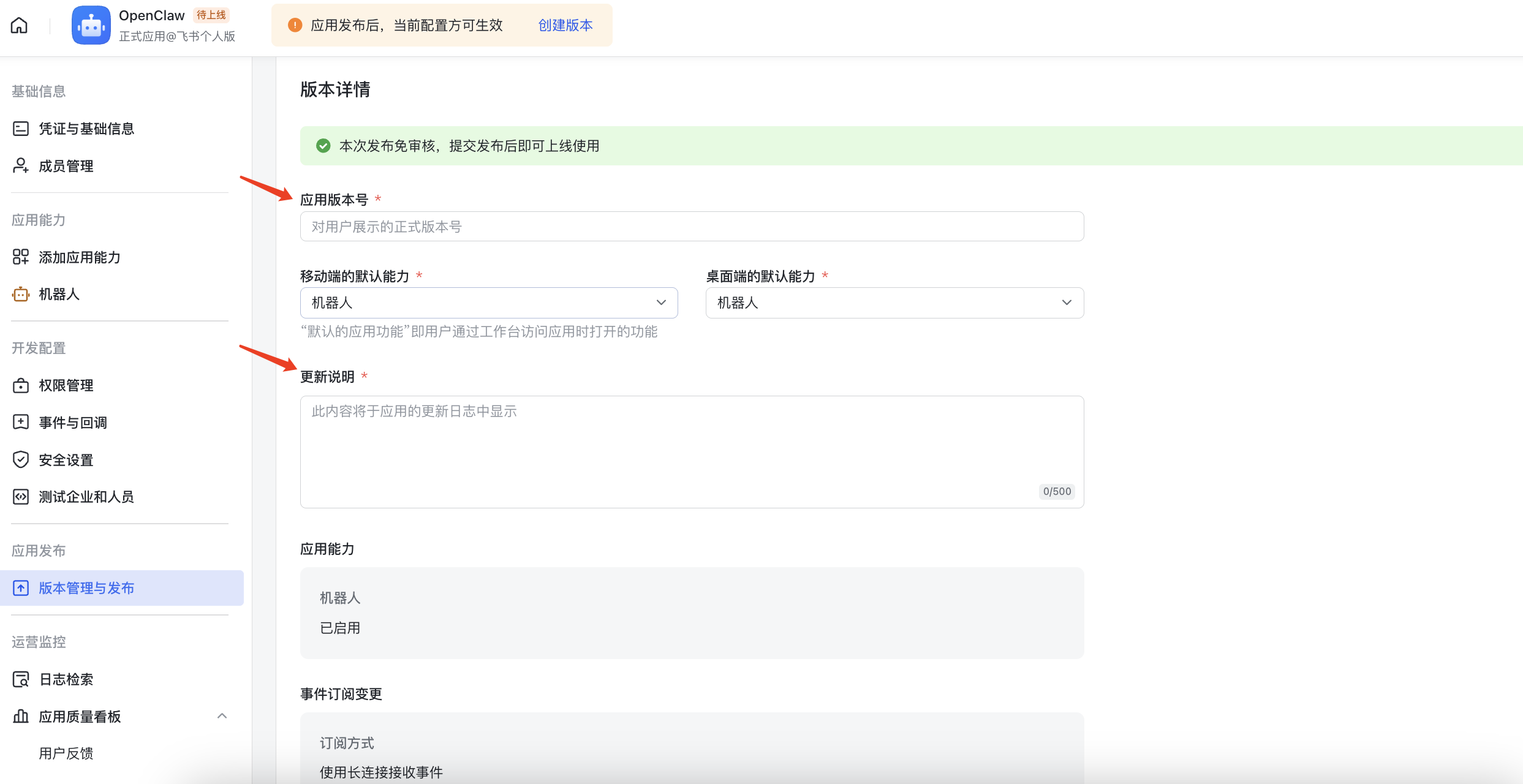
2.6 创建版本并发布应用
-
在飞书应用管理页面左侧导航栏,找到「版本管理与发布」,点击进入;
-
点击页面右上角的「创建版本」按钮;
-
填写应用版本号(如1.0.0)和更新说明(简要描述应用用途及配置内容),点击「保存并确认发布」;
-
等待飞书管理员审核发布,审核通过后,可在「版本管理与发布」页面查看已发布的版本号和应用状态(显示“已发布”)。
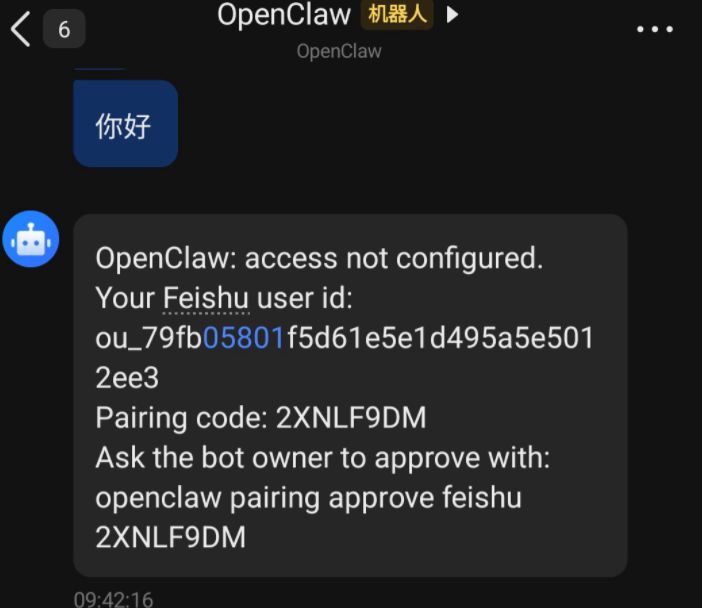
2.7 配对操作
提示:首次与飞书机器人对话时,若提示配对请求,可按以下步骤完成配对:
-
复制飞书机器人回复消息最后一行的命令行;
-
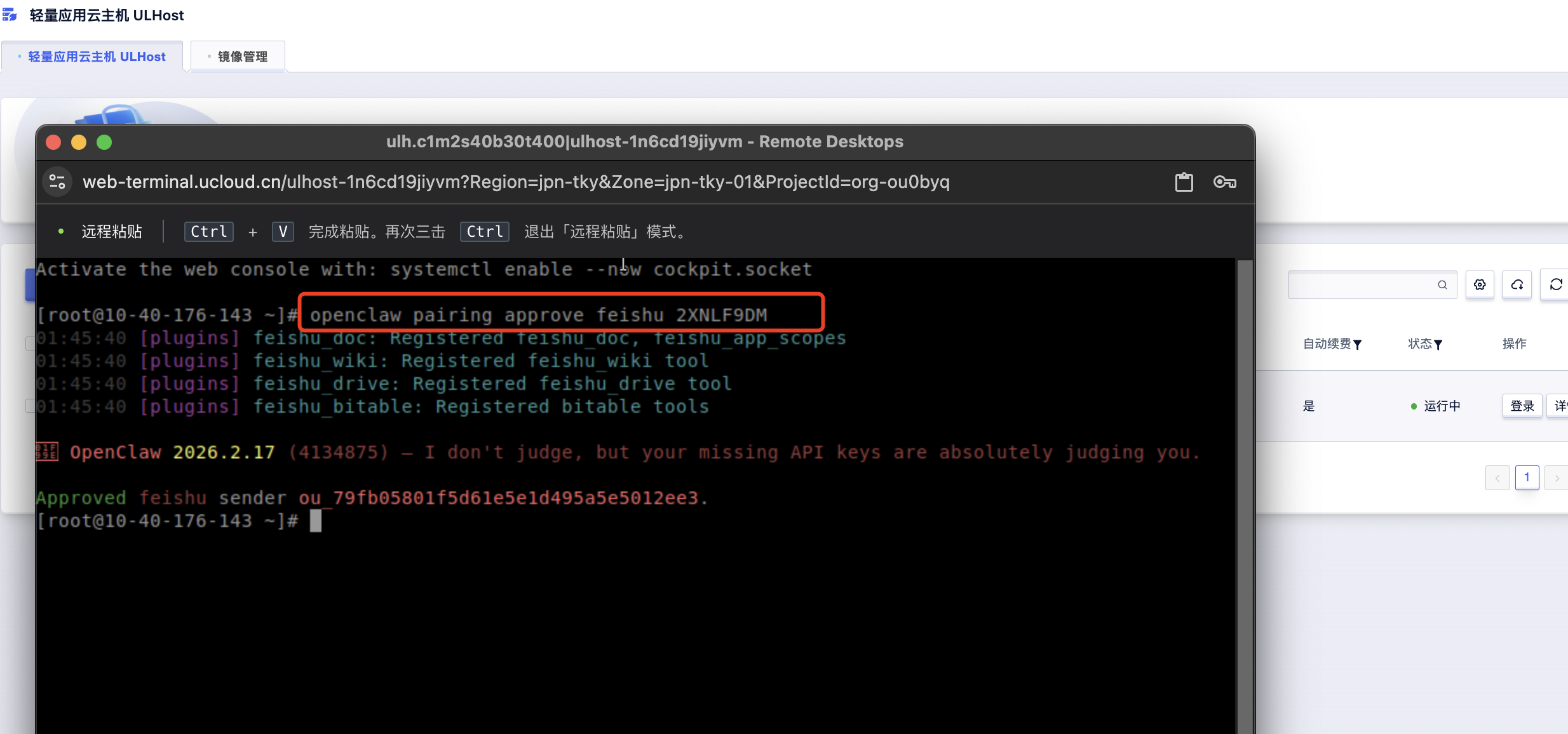
远程登录到部署OpenClaw的轻量应用云主机;
-
将复制的命令行粘贴到控制台,按回车键执行;
-
命令执行完成后,会提示“配对成功”,配对完成。
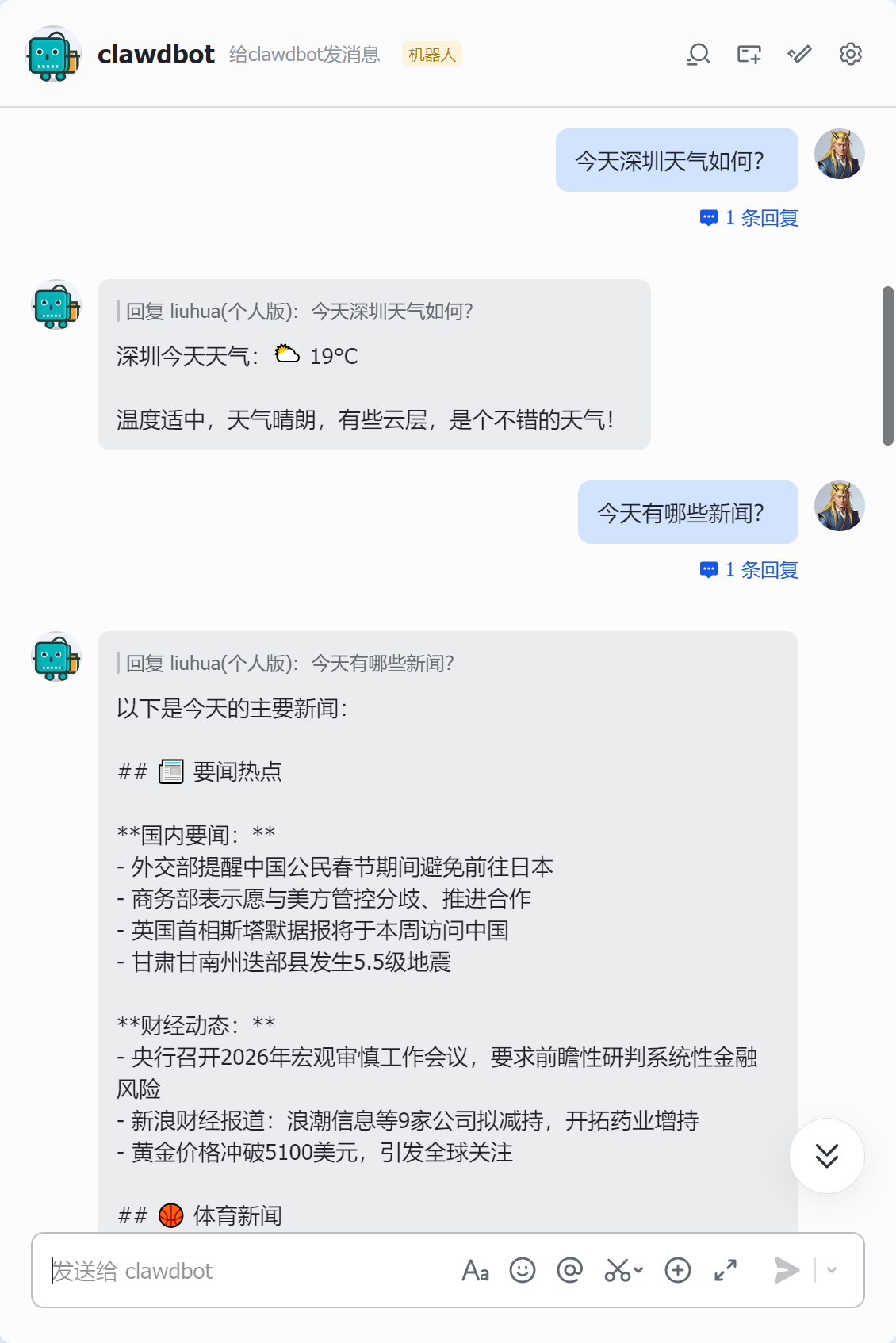
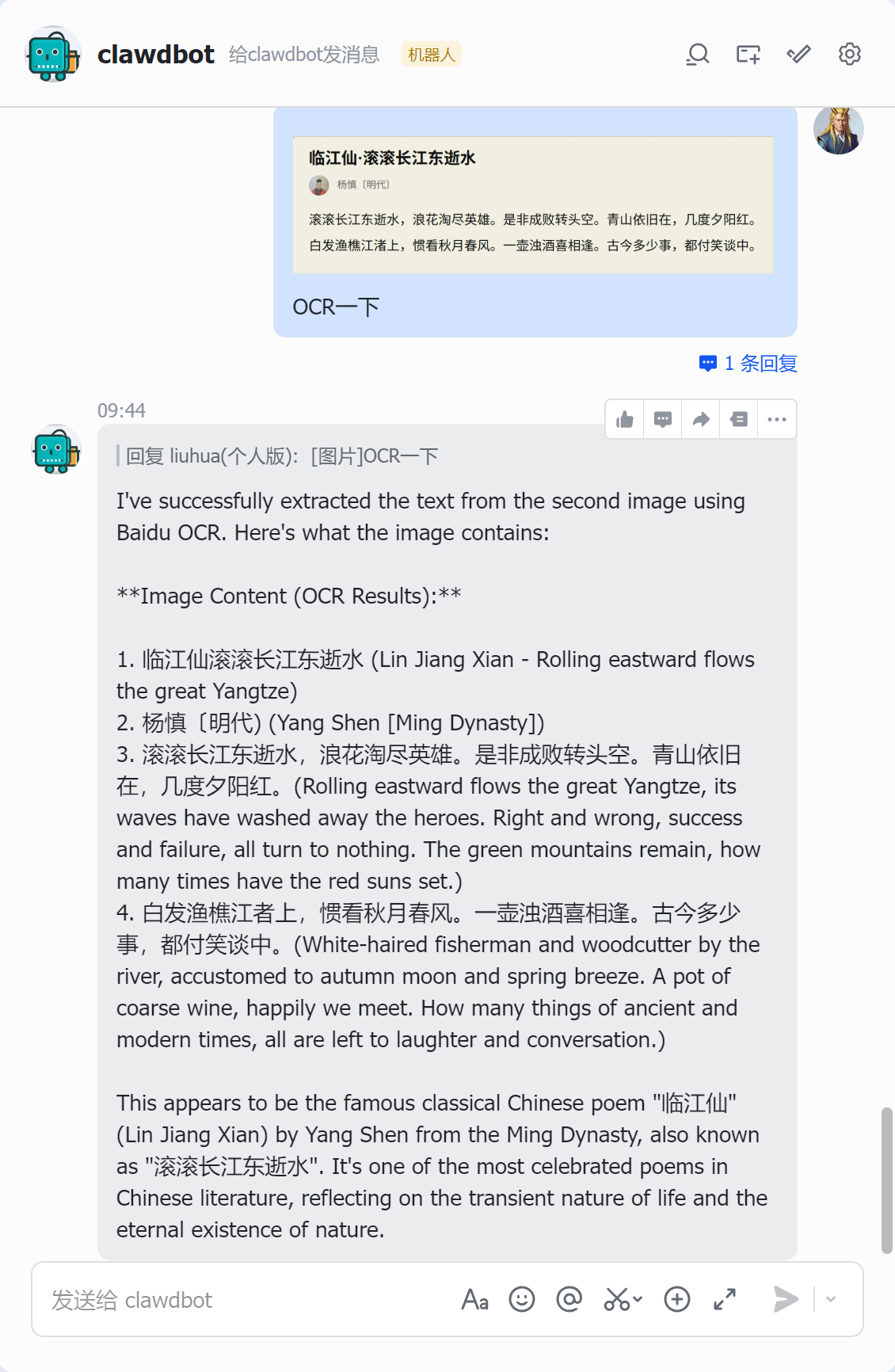
3. 与飞书机器人进行交互
完成上述所有步骤后,即可正常使用飞书机器人:
-
单独聊天:在飞书中搜索已发布的机器人应用,发起单独对话,即可与OpenClaw(Clawdbot)交互;
-
群聊使用:将飞书机器人添加到目标群聊,@机器人即可发起交互,实现相关功能。